
Steps - Enviromental Risk Assessment Matrix ERAM for Mobile Robots
 The ERAM serves as an invaluable instrument for prioritizing actions to mitigate risks associated with AGVs and AMRs installations. It encompasses a broad spectrum of concerns, ranging from personnel safety to environmental, legal, financial, and production-related risks.
The ERAM serves as an invaluable instrument for prioritizing actions to mitigate risks associated with AGVs and AMRs installations. It encompasses a broad spectrum of concerns, ranging from personnel safety to environmental, legal, financial, and production-related risks.
 My name is Alfredo Pastor ... and I love (literally) everything about mobile robots safety... .
My name is Alfredo Pastor ... and I love (literally) everything about mobile robots safety... .
When my friend Dave Van Herck, an undisputed expert in AGV safety, posed the question, "Alfredo, are you familiar with ERAM?"
😬 I had to admit my ignorance. Within a mere two minutes, Dave had illuminated the significance of this process in enhancing AGV and AMR safety. Inspired by the depth of its impact, we decided to develop a comprehensive one-hour masterclass as part of our "AGV and AMR Safety Course: From Design to Deployment."
In this post, I won't delve into the nitty-gritty of the one hour explanation (with a real case); instead, I'll introduce you to the concept of ERAM and outline its primary steps.
|
👨🏼🏫 This content is part of the learning material included in the online course: AGV & AMR Safety Course: From Design to Deployment Next opening: March 2024, write me at |
What is an ERAM?

Environment Risk Assessment Matrix (ERAM) is a vital component in the risk assessement and risk reduction for mobile robotics.
Its fundamental purpose revolves around assessing and managing the risks associated with the deployment of these robots within various environments such as industrial settings or warehouses. The ERAM typically employs a matrix format, which aids in the systematic identification, analysis, and mitigation of potential environmental risks.
🙋🏼♂️ It's not only about Health and Safety, for example, operational efficiency is another significant benefit of ERAM. By proactively identifying and addressing risks, it reduces potential downtime and improves the overall efficiency of mobile robot operations.
This preemptive approach can avoid expensive disruptions caused by accidents or equipment malfunctions.
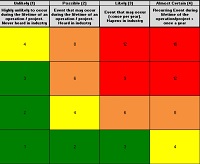
The ERAM matrix is used by plotting potential risks within the grid based on their evaluated consequence severity and likelihood of occurrence.
For example, in a mobile robot operation, if there's a risk of a robot collision with infrastructure that can cause a production halt (significant consequence) and is likely to happen (possible occurrence), it would fall into an orange cell with a risk score of 6, indicating a high priority for risk mitigation measures, for example with a Bow Tie process (also explained in our course 👨🏼🏫).

This is how a BOW TIE Risk Assessment looks like
By utilizing the ERAM matrix, decision-makers can systematically approach risk management, prioritize actions, and allocate resources more effectively to maintain safety and operational integrity.
Now, let's see the what are the ERAM steps... by the way, you can freely download this "cool" infograph 😎

You need to login to Download the Infograph.
| Click here to download the whitepaper |
What are the ERAM Steps?
1. Check Standards and Guidelines
The process begins with a review of relevant safety standards and guidelines, such as ISO standards for mobile robots or industry-specific safety requirements.
This step ensures that the risk assessment aligns with established best practices and legal regulations.
For example, when deploying AGVs in a manufacturing facility, one would need to consult standards related to machinery safety and autonomous operation, for example the ISO12100, EN/ISO 3691-4:2023, B11, ANSI/RIA 15.08 ,etc.
💡 Check this article for further information about these standards: What are the main AGV Safety Standards?
2. Make a Risk Assessment on the Environment

Picture from Module 3: Risk Assessment (AGV&AMR Safety Course)
This step involves analyzing the environment where the mobile robot will operate.
Risks are assessed based on the robot's interaction with its surroundings, considering factors such as traffic flow, potential obstacles, and human-robot interaction zones.
For an AMR navigating a warehouse, this might include assessing risks related to crossing paths with human workers or other vehicles.
3. Identifying Zones in a Plan
The physical areas of operation are marked on a layout plan, identifying zones with different risk levels.
For instance, an AGV operating near heat-treating equipment may be in a higher risk zone due to the possibility of heat exposure, whereas an AGV in a storage area might be in a lower risk zone.
Following ISO 3691-4:2023, the main types of zone are the operating zone, operating hazard zone, restricted zone, confined zone and load transfer zone.

Yes, there is another nice FREE infograph... just for registered members... 😬
| Click here to download the whitepaper |
4. Mark the Pinch Points
Pinch points are areas where there is a risk of collision or entrapment between the robot and fixed or moving parts of the environment, or between the robot and persons.
Examples of pinch points in mobile robot operation could include:
- Charging Stations: When a mobile robot docks or undocks from a charging station, there can be a pinch point between the robot and the station. If an operator's hand or fingers are in this area, they could be pinched or crushed.
- Robotic Arms: Some AMRs are equipped with robotic arms for picking and placing items. The joints of these arms can create pinch points where an operator could get fingers caught.
- Between mobile robot and conveyors: If a mobile robot is operating near a conveyor belt or any machinery with moving parts, the space between the robot and these objects can be a pinch point, especially if the robot is carrying materials that extend beyond its base.
- Mobile Robot Paths and Infrastructure: Pinch points can occur where AGVs pass close to walls, racks, or other infrastructure. If a person is in these tight spaces when an AGV passes, they could be caught between the robot and the stationary object.
- Doors and Gates: In facilities where mobile robots pass through doors or gates, pinch points can occur if these access points begin to close while the robot is passing through.
- Intersection of Robot Paths: In environments where multiple AGVs are operating and their paths intersect, pinch points can occur at these intersections, especially if the space is constrained.
5. Perform the ERAM

ERAM matrix example by Dave Van Herck
Finally, the risks identified in the previous steps are evaluated using the ERAM method.
This might include assigning severity levels to different risks and determining the likelihood of their occurrence.
The ERAM could help prioritize which risks need immediate mitigation measures.
For instance, if a mobile robot's path crosses frequently with forklift operations, the risk of collision is high and would require measures such as designated crossing points or automated traffic control systems to mitigate.
Conclusions
Just one thing.... you cannot have an agv/amr intalled without a proper ERAM.... ok, you can, but it will probably be less safer.
The utility of ERAM lies in its broad and methodical approach to identifying and managing risks, transcending beyond immediate safety concerns to encompass environmental, legal, financial, and operational aspects.
Employing ERAM aids in aligning mobile robot projects with current safety regulations, a step that is increasingly important as industry standards evolve alongside technological advancements. This alignment not only safeguards against potential legal repercussions but also enhances the project's credibility among stakeholders.
Moreover, ERAM plays a strategic role in the financial planning of mobile robot projects. It helps prioritize where safety investments will have the most significant impact, preventing expensive accidents or system downtimes.
Early risk identification during the design and deployment phases paves the way for smooth operations, minimizing disruptions and promoting workflow efficiency.
Perhaps most importantly, the iterative nature of ERAM allows for ongoing adaptation and refinement, supporting continuous improvement in safety and performance. This adaptability is crucial for maintaining operational excellence and ensuring the longevity and success of mobile robotics initiatives.
What are you waiting for? Go for the ERAM now....🏃🏼♀️🏃🏼♂️
|
Related articles AGV Sensors : 101: A Beginner's Guide to the Most Important Components AGV Safety: A comprehesive guide to understand automated guided safety |
Written by Alfredo Pastor Tella (agvnetwork editor).

Follow me on LinkedIn... let's create a mobile robot community to discuss and learn about these outstanding systems.
